2022年8月,深圳大学机电与控制工程学院曹广忠教授、黄苏丹副教授团队在电子电气工程领域国际顶级期刊IEEE Transactions on Industrial Electronics就平面电机控制技术研究发表了1篇研究论文“Robust Precision Position Tracking of Planar Motors Using Min-Max Model Predictive Control”,该期刊是中科院JCR工程技术大类一区TOP期刊,2021年影响因子为8.236。曹广忠教授为论文通讯作者,黄苏丹副教授为论文第一作者,深圳大学广东省电磁控制与智能机器人重点实验室为第一完成单位。
平面电机是高端装备光刻机中超精密工件台的核心关键技术,是我国集成电路芯片制造领域的卡脖子技术。团队近年致力于平面电机技术研究,创立了平面电机的机电一体化优化设计、无位置传感器位置精准辨识、控制以及高精度轨迹跟踪运动的系统新理论与新技术,为诸如高端半导体IC制造领域的超精密工件台所需要的平面驱动关键技术提供了新途径和解决方案,具有重要的理论价值和应用前景。
针对平面电机的强非线性、高度不确定性、运动耦合等因素导致其高精度轨迹跟踪困难,且为了解决执行器饱和下的平面电机高性能轨迹跟踪运动,率先将鲁棒模型预测控制理论引入平面电机控制领域,提出了基于最小-最大控制理论的平面电机鲁棒模型预测轨迹跟踪控制方法,解决了强非线性、高度不确定性、运动耦合、执行器饱和下的平面电机高精度鲁棒轨迹跟踪控制难题,为我国高端装备超精密工件台所需的平面直驱技术提供了新方法和新技术。
原文链接:https://ieeexplore.ieee.org/document/9640475/
研究得到了国家自然科学基金重点项目(U1813212)、国家自然科学基金面上项目(51677120)、国家自然科学基金青年项目(51907128)等支持。
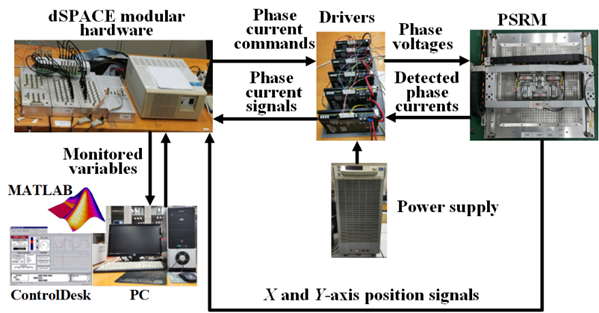
图1 平面电机位置跟踪控制系统实验平台结构框图

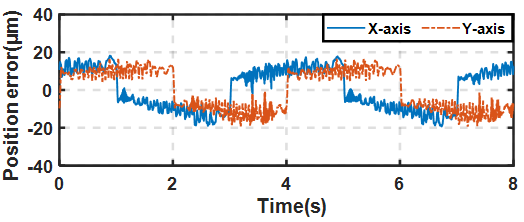
图2 平面电机系统圆形轨迹跟踪控制部分实验结果




